rupertobot
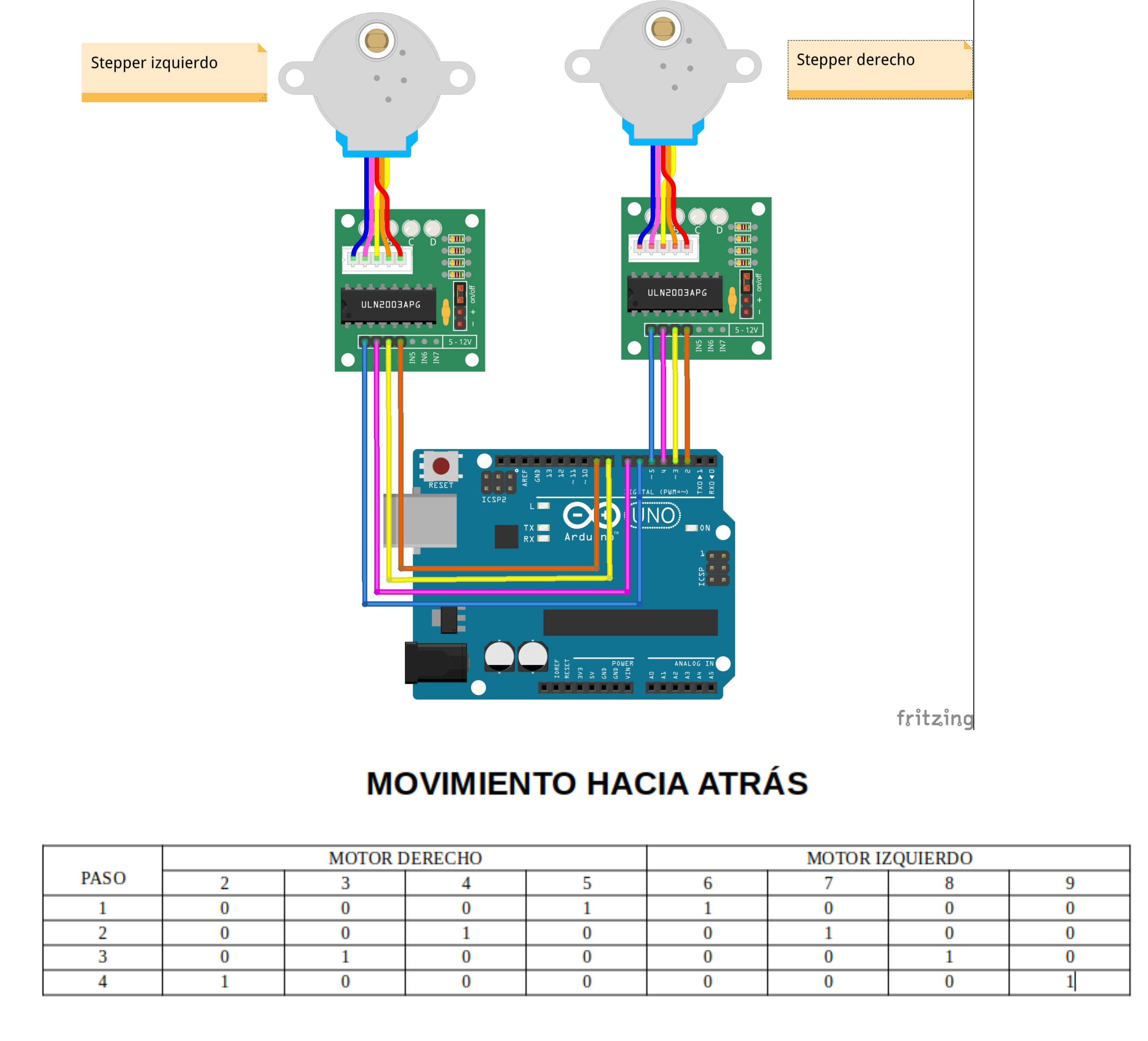
Movimiento hacia atrás
Introducción
En realidad, hago esta sección por vergüenza torera, pero si has hecho el ejercicio de mover hacia adelante tu Rupertobot, esta sección no debería hacerte falta.
Atrás
Ahora toca activar los pines 5->4->3->2 en este orden para el motor derecho, y al mismo tiempo excitaremos 6->7->8->9 para el motor izquierdo:
Programa en MasayloBlockly
Aquí te lo dejo:

## Programa tu Arduino
Si prefieres tirar del IDE de Arduino, el código básico sería:
void setup() {
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
}
void loop() {
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(2);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(2);
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
delay(2);
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
delay(2);
}
Descarga el programa
Hacia atrás, programa para MasayloBlockly
Hacia atrás, programa para IDE de Arduino