rupertobot
Como hacer giros
Introducción
Entendiendo que vayas siguiendo los ejemplos que te pongo por orden, es de suponer que ya estarás deduciendo cómo hacer que gire. A grandes rasgos, me vienen a la mente dos modos de giro en este robot:
- Hacer girar hacia adelante la rueda contraria al giro que queremos, y dejar parada la rueda de nuestro lado (Si giro a izquierda, la rueda derecha va hacia adelante, y la izquierda se para).
- O podemos hacer girar hacia adelante la rueda contraria al giro que queremos, y para aumentar par y velocidad, giramos hacia atrás la rueda del mismo lado hacia donde queremos girar.
 |
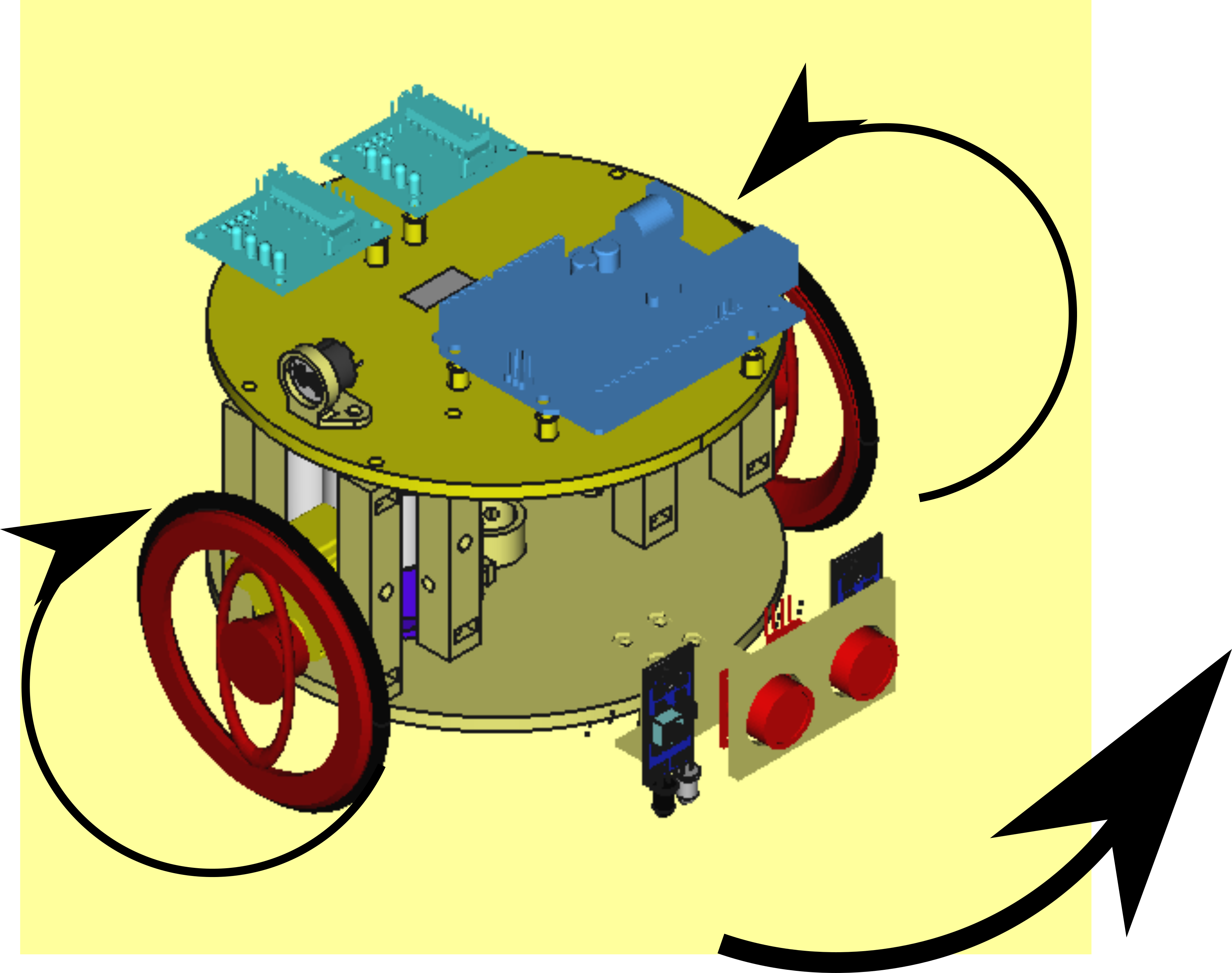 |
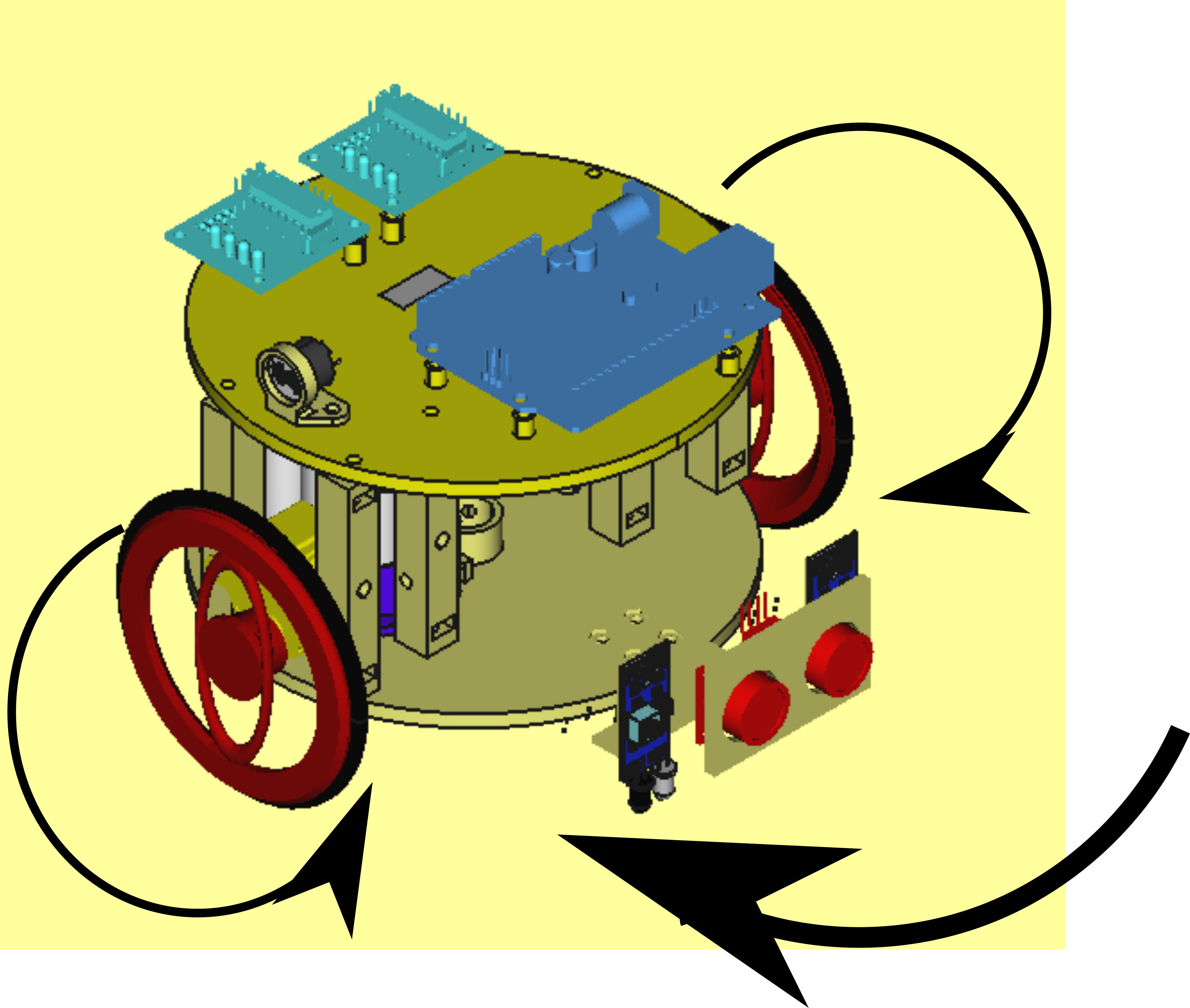
| Giro a derecha | Giro a izquierda |
Eso significa que, para girar hacia la derecha, el motor izquierdo debe girar en sentido antihorario y el derecho en sentido horario, mientras que para girar hacia la izquierda, habrá que hacerlo al revés.
Programas en MasayloBlockly
A continuación te presento los programas para ambos tipos de giro:
| GIRO A DERECHA | GIRO A IZQUIERDA |
| 5->4->3->2 | 2->3->4->5 |
| 9->8->7->6 | **6->7->8->9 ** |
 |
 |
Programa tu Arduino
Te dejo también los códigos:
CÓDIGO PARA GIRAR A IZQUIERDA EN ARDUINO
void setup() {
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
}
void loop() {
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, HIGH);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(2);
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(2);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
delay(2);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, HIGH);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
delay(2);
}
CÓDIGO PARA GIRAR A DERECHA EN ARDUINO
void setup() {
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
}
void loop() {
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, HIGH);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
delay(2);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
delay(2);
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(2);
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, HIGH);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(2);
}
Descarga los programas
Giro a derecha, programa para MasayloBlockly
Giro a izquierda, programa para MasayloBlockly
Giro a derecha, programa para IDE de Arduino
Giro a izquierda, programa para IDE de Arduino